This thesis discusses the project of an instrumented bike which main goal is to implement a CAS (Collision Avoidance System) to detect and alert the user for two types of possible collisions. The two types encompass collisions with static obstacles and collisions with incoming obstacles, which could represent a pedestrian crossing the path of the cyclist and a vehicle coming towards it.
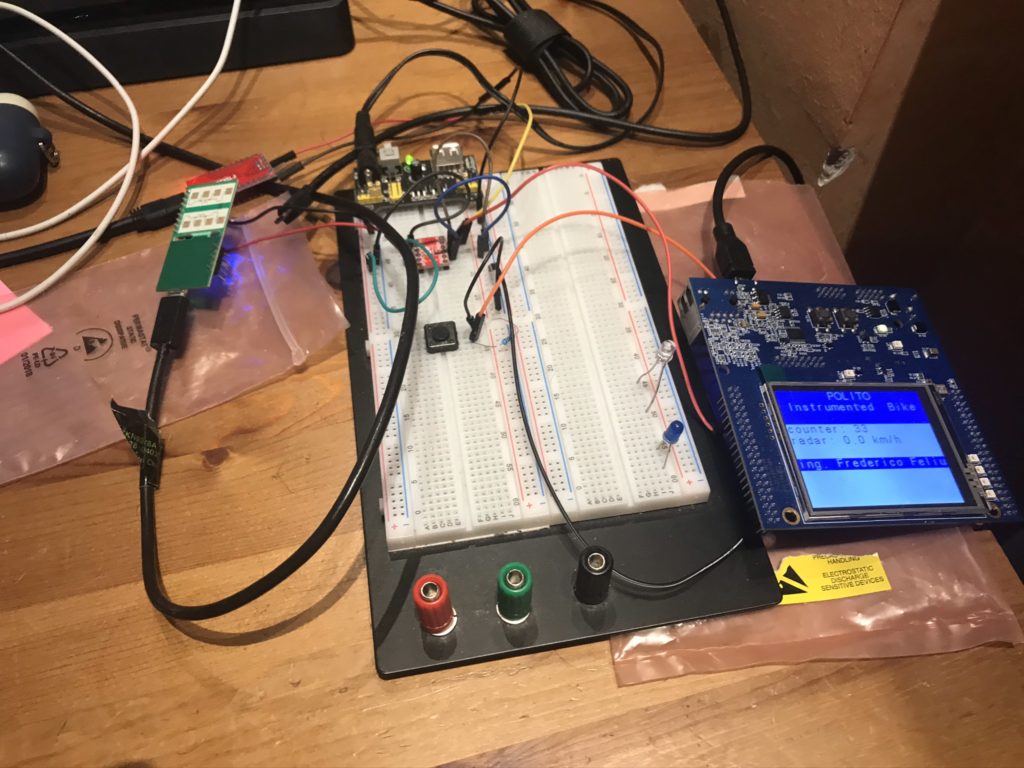
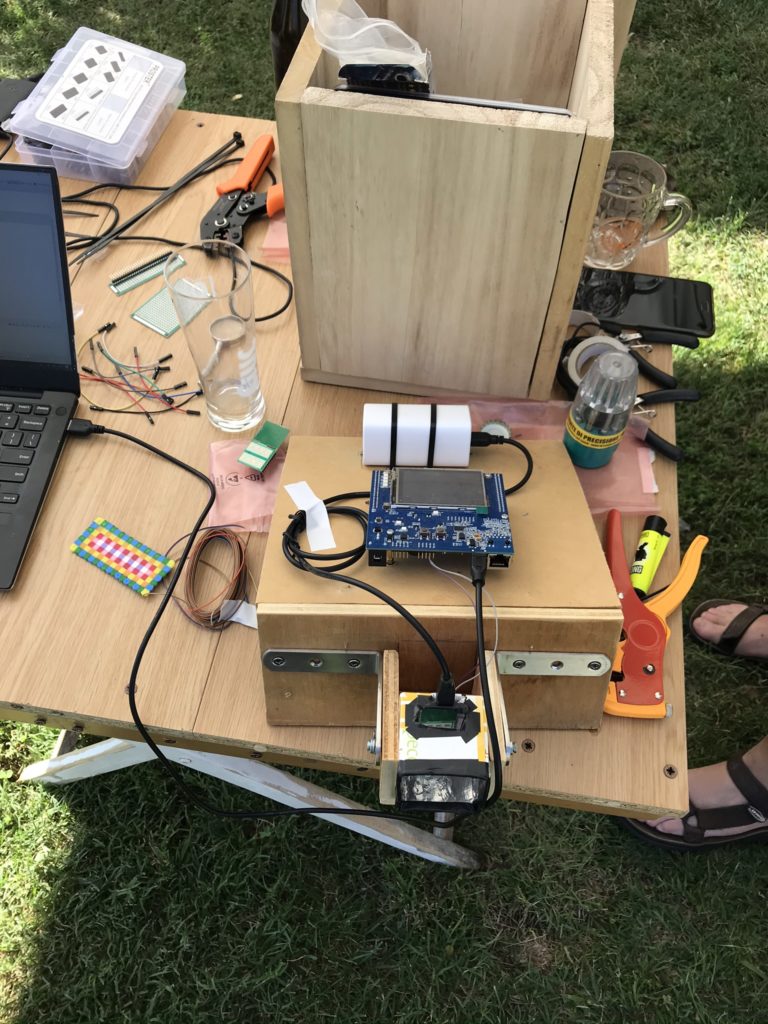
In order to prevent possible collisions, an AURIX 2G microcontroller is used to interpret the signals from different sensors with the intention of evaluate the imminence of a collision of the bicycle during its regular use. To provide a system which works in any light or weather condition, a doppler radar was used working in the ISM band (Industrial, Scientific and Medical band) as also a magnetic field sensor to detect the real speed of the bicycle. To prove the viability of the system, extensive experimental tests were performed, using an instrumented bicycle to show the performance of the project in detecting a possible collision.
Thesis_presentation_Frederico_Feliu_CASWEBSITEWe can observe in the next figure the field of action of the bicycle. The future point aimed for this project is 5m, and can be better visualized in the following figure.

A demonstration video of the behavior of the project can be observed next. The responsiveness of the collision avoidance system can be observed in many situations. The video was performed at night to better visualize the information on the screen.
The antenna was designed in order to avoid detecting movements that is not in the future point of the bicycle. In the video is possible to observe that the radar does not identify any movement in the normal behavior of the bicycle, and due this, the relative speed is usually the same as the bicycle but with inverse signal (RelativeSpeed = RadarSpeed – BicycleSpeed). On the other hand, if the radar identifies a movement, this is then used to analyze the type of collision.
This project was possible thanks to Infineon Technologies AG.